I'm Joel Adams, a robotics researcher who has long admired intelligent machines and wondered what more they could do.
My research focuses on applied autonomous systems and motion planning with an emphasis on heuristic strategies for solving problems in real-world complicated spaces.
About Me
• Name: Joel Adams
• Field: Engineering & Robotics
• Current Status: PhD Candidate
• Research Focus: Robotics development in unstructured environments
• Thesis Title: Modeling Heuristic and Adaptive Robot Behavior for Long-term Surveillance of Nuclear Facilities
• University: Florida International University
Technical Skills
I have extensive experience utilizing ROS and ROS2 in both C++ and Python. Usually combining various different programming libraries to bring together a robot solution. Although I have used simulators such as Gazebo and Pybullet, my work heavily focuses on getting robots to function in the real world.
I can work with many different tools that make development easier such as Docker and have very high expertise using Linux and Bash. My degree is in Mechanical Engineering, consequently I have additional skills relevant to robotics such as knowledge of circuits, CAD design, and great experience with computer networks.
Publications
A Behavioral Robotics Approach to Radiation Mapping Using Adaptive Sampling
https://doi.org/10.3390/app15042050Heuristic Robot Behavior Design for Adaptive Mapping in Nuclear Facilities using Bayesian Optimization
To be submitted soon
Projects
Click on any of the project titles for more details!Adaptive Radiation Mapping
Leveraged Bayesian optimization for radiation mapping using custom behavior modeling on a manipulator equipped quadruped platform.Multi-Robot Coordination
Implemented behavior trees and network bridges for mission planning and collaboration among multiple robotic ground platforms.Waste Sampling Manipulator
Constructed a robotic arm system integrating computer vision, sampling-based inverse kinematics, and sensor feedback for simulated waste sampling.Autonomous Radiological Surveillance
Developed and integrated LiDAR and computer vision solutions to support autonomous mapping and inspection in nuclear environments.Tunnel Mapping using Mobile Robot
Researched and tested advanced sensor suites for 3D mapping of concrete tunnels using ROS-based framework.
In this project, the idea is to develop a solution where a robot can monitor a highly unstructured nuclear facility for possible low-levels of radiation. Because it would be too time consuming to have a platform do exhaustive mapping, an adaptive mapping approach is used where a probabilistic radiation map is constructed using Bayesian optimization.
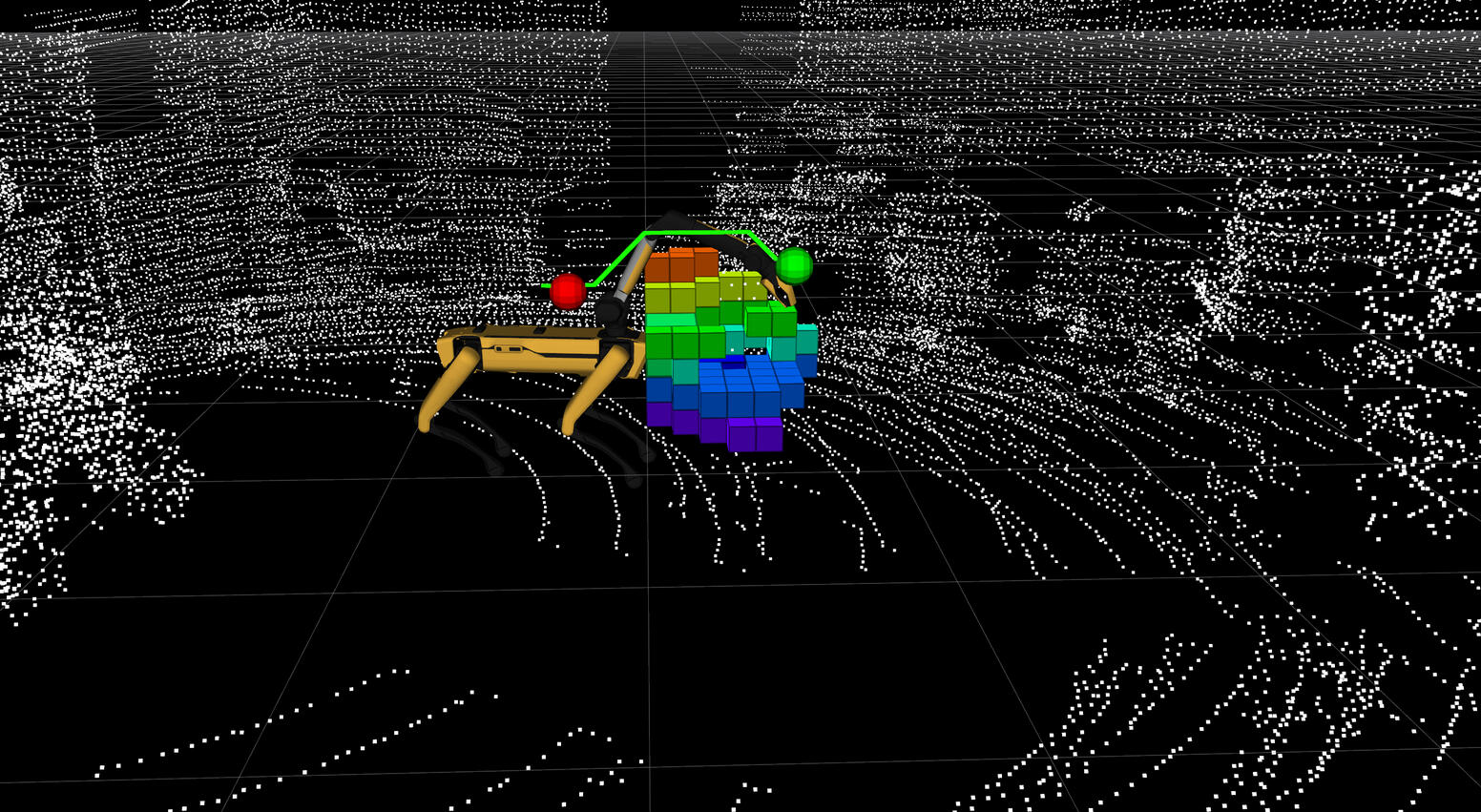
As you can see in the image below, the idea is to maximize flexibility in order to deal with the difficulties of deploying robots in real-world unstructured environments (ignore that it knocked over that traffic cone.)

That is a radiation sensor attached to the manipulator's jaw for performing the detection, and it has its built-in depth cameras (five of them) and a 3D lidar for geometric awareness of the surroundings. Below you can see the reconstructed environment and the selection of a local region for planning the arm trajectory with A*.
Why is something as simplistic as A* being used for manipulator motion planning? The approach being used is to model more flexible behavior and see how robust it is for the task at hand. Think of this reactive behavior approach as inspired by BEAM robotics where simple analogue circuits are used to make small robots with behavior. The downside to this approach is that the outcome is very application specific. Since the behavior is being modeled for radiation monitoring, it wont be transferable to having the same robot try to paint walls, or swap tables. We are not fully adopting a BEAM robotics philosophy, but rather trying to balance between complexity and simplicity. The behavior tree below shows the flow for the robot when performing mapping. The * indicates a reactive sequence instead of a regular one.
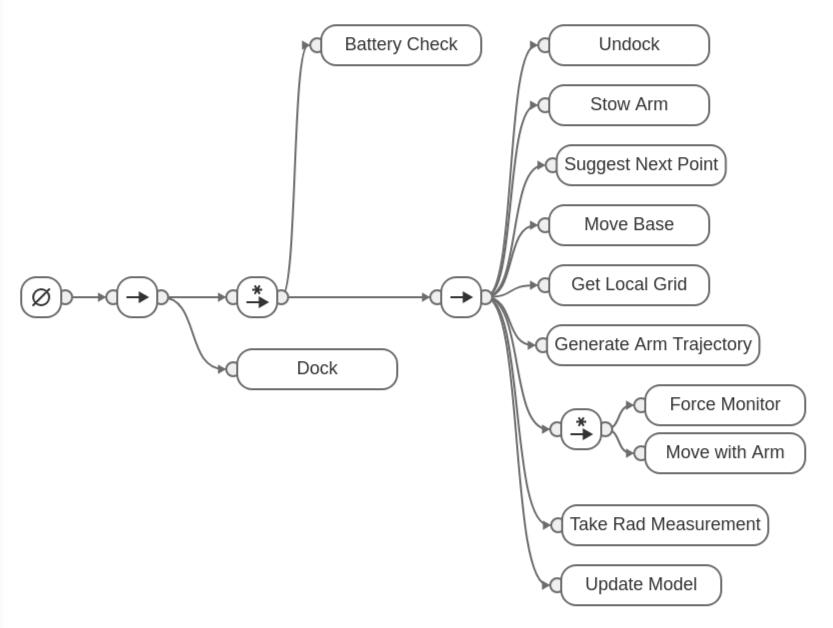
The motion planners provided by Boston Dynamics are used which does not integrate obstacle avoidance for the arm. Thus, instead of utilizing a sampling-based motion planner, the behavior designed is to monitor the force and have the arm retract if a collision begins to occur. Because A* does not account for the kinematics of the arm, this may sometimes happen, however if for the adaptive mapping task this only happens rarely, it may be good enough, especially since an exhaustive mapping technique is not being utilized.
Below is one of the resulting radiation maps tested with a small Cesium-137 source placed under a cone.
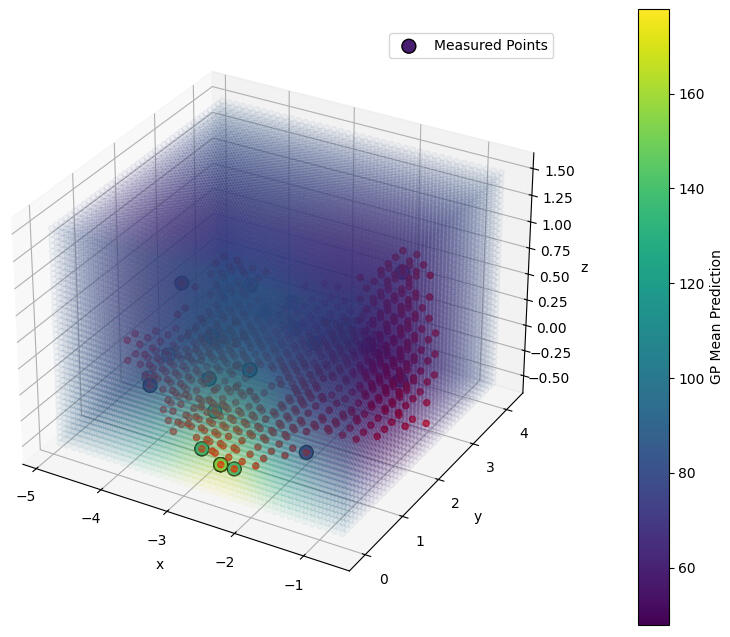
There are a lot more considerations that have gone into the behavior modeling than is discussed here. The force monitoring being tuned, the need for retracting the arm prior to navigating to a new measurement, the Bayesian optimization parameters, the strategy of using the Gaussian process suggestions vs injecting random ones.etc
Overall, the platform is able to perform the task in a small lab setting, and hopefully the design approach allows for easier scaling up into larger and more complex facilities. The modular design of the software should also make it more platform agnostic and capable of working with multiple robots simultaneously.
Under construction!
Under construction!
Under construction!
Under construction!
Reach out to me!
Email: [email protected]
Find me on Bluesky!